Autoregressive Diffusion
Poster
 View a PDF version of the poster here.
View a PDF version of the poster here.
Overview
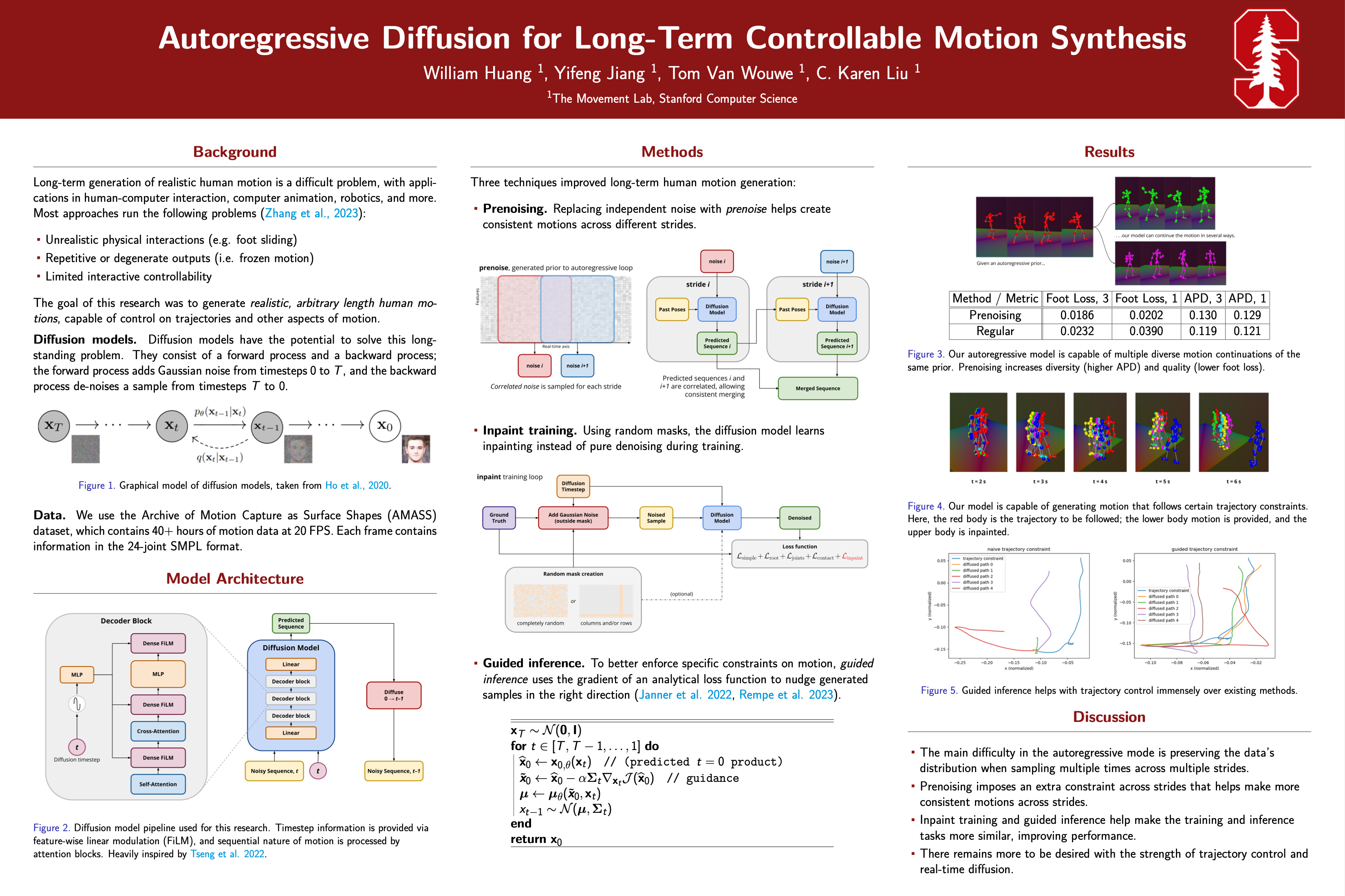
Long-term generation of realistic human motion is a difficult problem, with applications in human-computer interaction, computer animation, robotics, and more. Most approaches run the following problems:
- Unrealistic physical interactions (e.g. foot sliding)
- Repetitive or degenerate outputs (i.e. frozen motion)
- Limited interactive controllability
Current Findings:
- The main difficulty in the autoregressive mode is preserving the data’s distribution when sampling multiple times across multiple strides.
- Prenoising imposes an extra constraint across strides that helps make more consistent motions across strides.
- Inpaint training and guided inference help make the training and inference tasks more similar, improving performance.
- There remains more to be desired with the strength of trajectory control and real-time diffusion.
Publication
In the works.